
1. Giới thiệu chuẩn giao tiếp SPI
1.1SPI là gì
SPI (Serial Peripheral Bus) là một chuẩn truyền thông nối tiếp tốc độ cao do hãng Motorola đề xuất. Đây là kiểu truyền thông Master-Slave, trong đó có 1 chip Master điều phối quá trình tuyền thông và các chip Slaves được điều khiển bởi Master vì thế truyền thông chỉ xảy ra giữa Master và Slave. SPI là một cách truyền song công (full duplex) nghĩa là tại cùng một thời điểm quá trình truyền và nhận có thể xảy ra đồng thời.
1.2 Mô hình kết nối
Mô hình gồm có các chân kết nối :
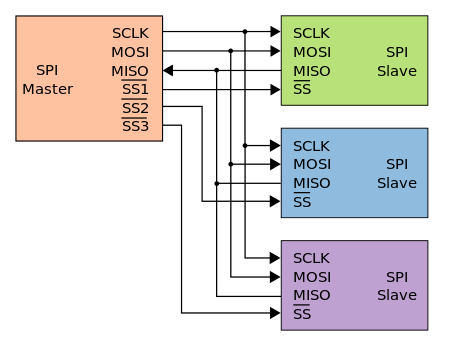
– MOSI hay SI – cổng ra của bên Master ( Master Out Slave IN). Đây là chân dành cho việc truyền tín hiệu từ thiết bị chủ động đến thiết bị bị động.
– MISO hay SO – Cổng ra bên Slave (Master IN Slave Out). Đây là chân dành cho việc truyền dữ liệu từ Slave đến Master.
– SCLK hay SCK là tín hiệu clock đồng bộ (Serial Clock). Xung nhịp chỉ được tạo bởi Master.
– CS hay SS là tín hiệu chọn vi mạch ( Chip Select hoặc Slave Select). SS sẽ ở mức cao khi không làm việc. Nếu Master kéo SS xuông thấp thì sẽ xảy ra quá trình giao tiếp. Chỉ có một đường SS trên mỗi slave nhưng có thể có nhiều đường điều khiển SS trên master, tùy thuộc vào thiết kế của người dùng.
Mỗi master và slave có một thanh ghi 8 bit. Cứ mỗi xung nhịp do Master tạo ra trên đường giữ nhịp SCK, một bit trong thanh ghi dữ liệu của Master được truyền qua Slave trên đường MOSI, đồng thời một bit trong thanh ghi dữ liệu của chip Slave cũng được truyền qua Master trên đường MISO. Do 2 gói dữ liệu trên 2 chip được gởi qua lại đồng thời nên quá trình truyền dữ liệu này được gọi là “song công”.
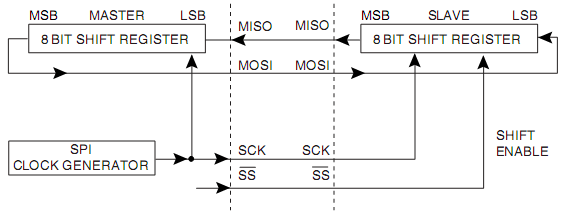
Việc đọc và nhận cũng chỉ trên duy nhất một thanh ghi. Khi master muốn đọc 1 byte dữ liệu thì master phải gửi 1 byte đi trước. muốn đọc n bytes thì phải gửi đúng n bytes.
2. Viết code
Trên STM32F107VCT6 mình sẽ connect như bên dưới
Kết nối phần cứng
STM32 Micro SD Card
PA5 SCK
PA7 MOSI
PA6 MISO
5V VCC
GND GND
PA4 CS
Phần tạo project các bạn tham khảo lại bài 2 phần GPIO nhé(cách tạo project, cấu hình mạch nạp, xung clock) tại đây
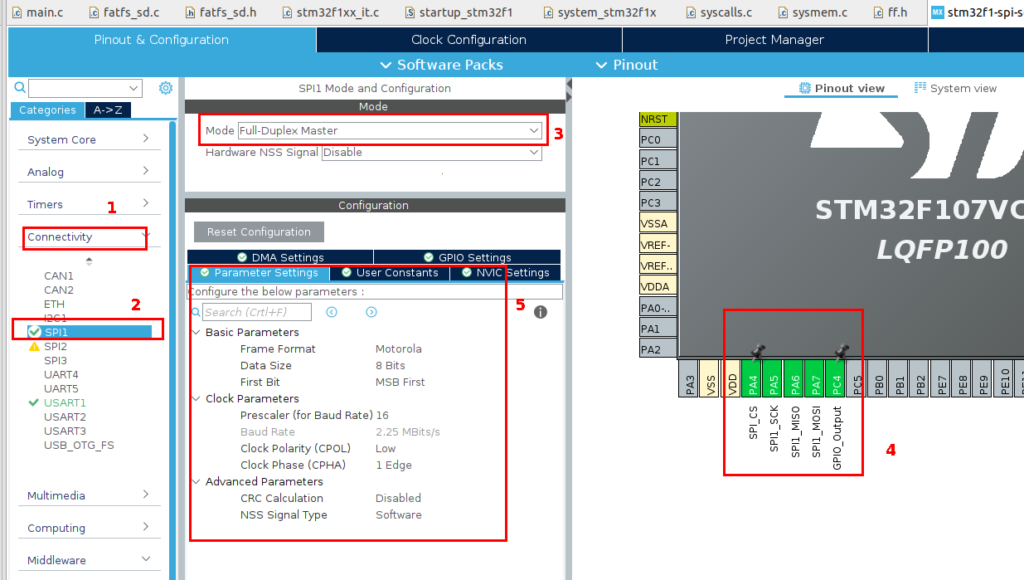
Bây giờ mình tiến hành cấu hình SPI1 để đọc SD Card:
(1) Chọn Connectivity
(2) Tìm đến module SPI1
(3) Chọn mode Full-Dulex Master
(4) Chân PA5,PA6,PA7 sẽ được cấu hình dùng cho SPI1
(5) Setting Parameter
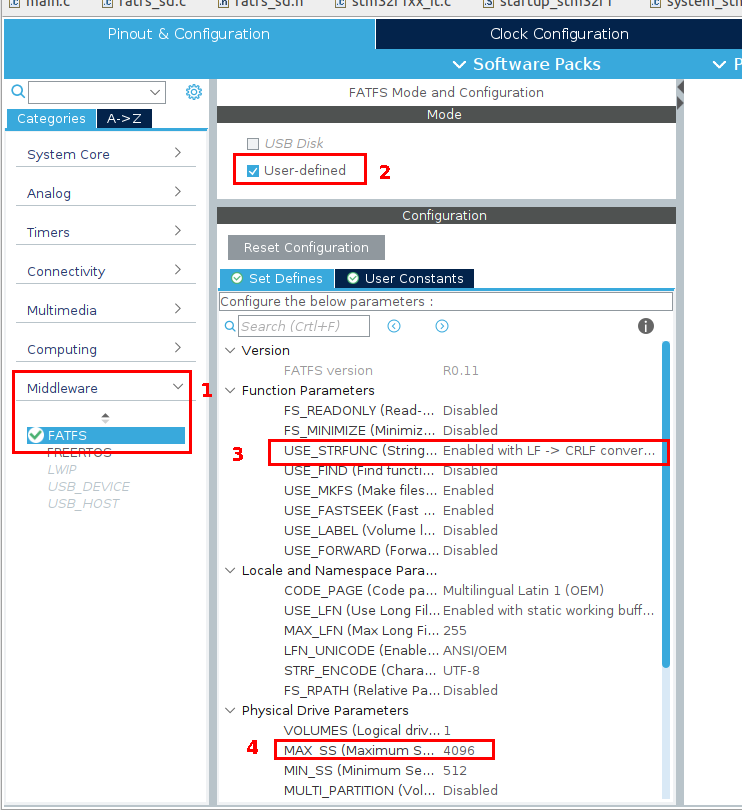
Cấu hình dùng thư viện FATFS
(1) Chọn Middleware
(2) Chọn User-defined
(3) Config USE_LFN
(4) MAX_SS
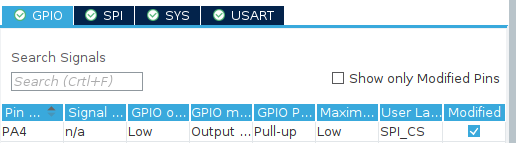
Cấu hình chân PA4 GPIO output để dùng chân CS
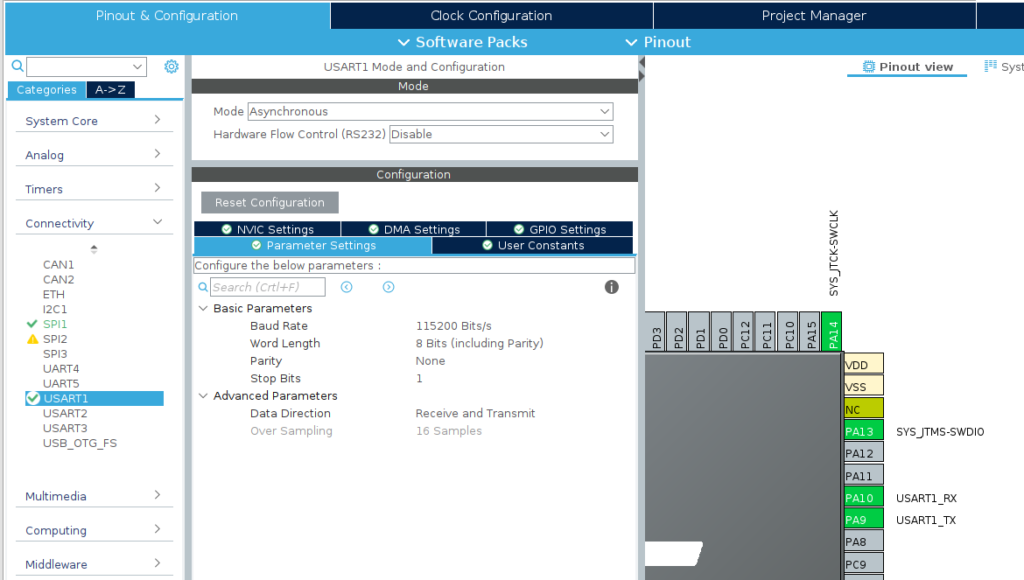
Cấu hình dùng UART
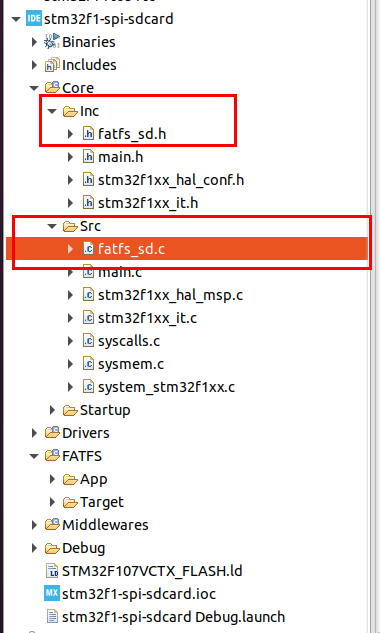
Sau copy file fatfs_sd.c và file fatfs_sd.h vào thư mục Core/src/ và Core/Inc như hình bên dưới
Trong file STM32f1xx_it.c ta chỉnh sửa thêm code như bên dưới
volatile uint8_t FatFsCnt = 0;
volatile uint8_t Timer1, Timer2;
void SDTimer_Handler(void)
{
if(Timer1 > 0)
Timer1--;
if(Timer2 > 0)
Timer2--;
}
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
FatFsCnt++;
if(FatFsCnt >= 10)
{
FatFsCnt = 0;
SDTimer_Handler();
}
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
Chỉnh sửa file user_diskio.c như bên dưới
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file user_diskio.c
* @brief This file includes a diskio driver skeleton to be completed by the user.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
#ifdef USE_OBSOLETE_USER_CODE_SECTION_0
/*
* Warning: the user section 0 is no more in use (starting from CubeMx version 4.16.0)
* To be suppressed in the future.
* Kept to ensure backward compatibility with previous CubeMx versions when
* migrating projects.
* User code previously added there should be copied in the new user sections before
* the section contents can be deleted.
*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
#endif
/* USER CODE BEGIN DECL */
/* Includes ------------------------------------------------------------------*/
#include <string.h>
#include "ff_gen_drv.h"
#include "fatfs_sd.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Disk status */
static volatile DSTATUS Stat = STA_NOINIT;
/* USER CODE END DECL */
/* Private function prototypes -----------------------------------------------*/
DSTATUS USER_initialize (BYTE pdrv);
DSTATUS USER_status (BYTE pdrv);
DRESULT USER_read (BYTE pdrv, BYTE *buff, DWORD sector, UINT count);
#if _USE_WRITE == 1
DRESULT USER_write (BYTE pdrv, const BYTE *buff, DWORD sector, UINT count);
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
DRESULT USER_ioctl (BYTE pdrv, BYTE cmd, void *buff);
#endif /* _USE_IOCTL == 1 */
Diskio_drvTypeDef USER_Driver =
{
USER_initialize,
USER_status,
USER_read,
#if _USE_WRITE
USER_write,
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
USER_ioctl,
#endif /* _USE_IOCTL == 1 */
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes a Drive
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_initialize (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
/* USER CODE BEGIN INIT */
// Stat = STA_NOINIT;
// return Stat;
return SD_disk_initialize(pdrv);
/* USER CODE END INIT */
}
/**
* @brief Gets Disk Status
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_status (
BYTE pdrv /* Physical drive number to identify the drive */
)
{
/* USER CODE BEGIN STATUS */
// Stat = STA_NOINIT;
// return Stat;
return SD_disk_status(pdrv);
/* USER CODE END STATUS */
}
/**
* @brief Reads Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data buffer to store read data
* @param sector: Sector address (LBA)
* @param count: Number of sectors to read (1..128)
* @retval DRESULT: Operation result
*/
DRESULT USER_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to read */
)
{
/* USER CODE BEGIN READ */
// return RES_OK;
return SD_disk_read(pdrv, buff, sector, count);
/* USER CODE END READ */
}
/**
* @brief Writes Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data to be written
* @param sector: Sector address (LBA)
* @param count: Number of sectors to write (1..128)
* @retval DRESULT: Operation result
*/
#if _USE_WRITE == 1
DRESULT USER_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to write */
)
{
/* USER CODE BEGIN WRITE */
/* USER CODE HERE */
// return RES_OK;
return SD_disk_write(pdrv, buff, sector, count);
/* USER CODE END WRITE */
}
#endif /* _USE_WRITE == 1 */
/**
* @brief I/O control operation
* @param pdrv: Physical drive number (0..)
* @param cmd: Control code
* @param *buff: Buffer to send/receive control data
* @retval DRESULT: Operation result
*/
#if _USE_IOCTL == 1
DRESULT USER_ioctl (
BYTE pdrv, /* Physical drive nmuber (0..) */
BYTE cmd, /* Control code */
void *buff /* Buffer to send/receive control data */
)
{
/* USER CODE BEGIN IOCTL */
// DRESULT res = RES_ERROR;
// return res;
return SD_disk_ioctl(pdrv, cmd, buff);
/* USER CODE END IOCTL */
}
#endif /* _USE_IOCTL == 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Code file “main.c”:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "fatfs.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include <stdio.h>
#include "fatfs_sd.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* Private function prototypes -----------------------------------------------*/
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi1;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
FATFS fs; // file system
FIL fil; // File
FILINFO fno;
FRESULT fresult; // result
UINT br, bw; // File read/write count
/**** capacity related *****/
FATFS *pfs;
DWORD fre_clust;
uint32_t total, free_space;
#define BUFFER_SIZE 128
char buffer[BUFFER_SIZE]; // to store strings..
int i=0;
int bufsize (char *buf)
{
int i=0;
while (*buf++ != '\0') i++;
return i;
}
void clear_buffer (void)
{
for (int i=0; i<BUFFER_SIZE; i++) buffer[i] = '\0';
}
void send_uart (char *string)
{
uint8_t len = strlen (string);
HAL_UART_Transmit(&huart1, (uint8_t *) string, len, HAL_MAX_DELAY); // transmit in blocking mode
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
MX_USART1_UART_Init();
MX_FATFS_Init();
/* USER CODE BEGIN 2 */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_RESET);
HAL_Delay (500);
fresult = f_mount(&fs, "/", 1);
if (fresult != FR_OK){
printf ("ERROR with code:%d!!! in mounting SD CARD...\n\n",fresult);
}
else{
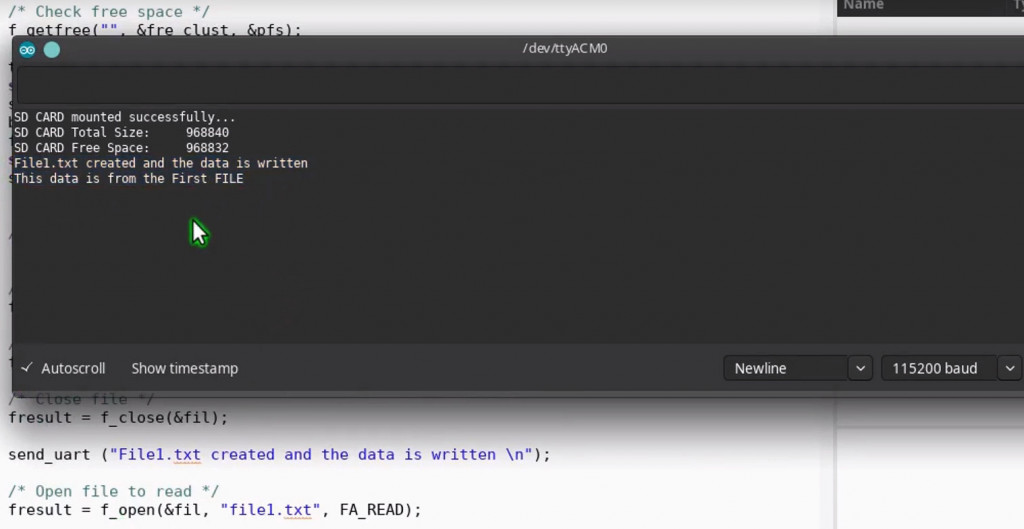
send_uart("SD CARD mounted successfully...\n\n");
/*************** Card capacity details ********************/
/* Check free space */
f_getfree("", &fre_clust, &pfs);
total = (uint32_t)((pfs->n_fatent - 2) * pfs->csize * 0.5);
sprintf (buffer, "SD CARD Total Size: \t%lu\n",total);
send_uart(buffer);
clear_buffer();
free_space = (uint32_t)(fre_clust * pfs->csize * 0.5);
sprintf (buffer, "SD CARD Free Space: \t%lu\n\n",free_space);
send_uart(buffer);
clear_buffer();
/************* The following operation is using PUTS and GETS *********************/
/* Open file to write/ create a file if it doesn't exist */
fresult = f_open(&fil, "file1.txt", FA_OPEN_ALWAYS | FA_READ | FA_WRITE);
/* Writing text */
f_puts("This data is from the FILE1.txt. And it was written using ...f_puts... ", &fil);
/* Close file */
fresult = f_close(&fil);
if (fresult == FR_OK)send_uart ("File1.txt created and the data is written \n");
/* Open file to read */
fresult = f_open(&fil, "file1.txt", FA_READ);
/* Read string from the file */
f_gets(buffer, f_size(&fil), &fil);
send_uart("File1.txt is opened and it contains the data as shown below\n");
send_uart(buffer);
send_uart("\n\n");
/* Close file */
f_close(&fil);
clear_buffer();
/**************** The following operation is using f_write and f_read **************************/
/* Create second file with read write access and open it */
fresult = f_open(&fil, "file2.txt", FA_CREATE_ALWAYS | FA_WRITE);
/* Writing text */
strcpy (buffer, "This is File2.txt, written using ...f_write... and it says Hello from Controllerstech\n");
fresult = f_write(&fil, buffer, bufsize(buffer), &bw);
send_uart ("File2.txt created and data is written\n");
/* Close file */
f_close(&fil);
// clearing buffer to show that result obtained is from the file
clear_buffer();
/* Open second file to read */
fresult = f_open(&fil, "file2.txt", FA_READ);
if (fresult == FR_OK)send_uart ("file2.txt is open and the data is shown below\n");
/* Read data from the file
* Please see the function details for the arguments */
f_read (&fil, buffer, f_size(&fil), &br);
send_uart(buffer);
send_uart("\n\n");
/* Close file */
f_close(&fil);
clear_buffer();
/*********************UPDATING an existing file ***************************/
/* Open the file with write access */
fresult = f_open(&fil, "file2.txt", FA_OPEN_EXISTING | FA_READ | FA_WRITE);
/* Move to offset to the end of the file */
fresult = f_lseek(&fil, f_size(&fil));
if (fresult == FR_OK)send_uart ("About to update the file2.txt\n");
/* write the string to the file */
fresult = f_puts("This is updated data and it should be in the end", &fil);
f_close (&fil);
clear_buffer();
/* Open to read the file */
fresult = f_open (&fil, "file2.txt", FA_READ);
/* Read string from the file */
fresult = f_read (&fil, buffer, f_size(&fil), &br);
if (fresult == FR_OK)send_uart ("Below is the data from updated file2.txt\n");
send_uart(buffer);
send_uart("\n\n");
/* Close file */
f_close(&fil);
clear_buffer();
/*************************REMOVING FILES FROM THE DIRECTORY ****************************/
fresult = f_unlink("/file1.txt");
if (fresult == FR_OK) send_uart("file1.txt removed successfully...\n");
fresult = f_unlink("/file2.txt");
if (fresult == FR_OK) send_uart("file2.txt removed successfully...\n");
/* Unmount SDCARD */
fresult = f_mount(NULL, "/", 1);
if (fresult == FR_OK) send_uart ("SD CARD UNMOUNTED successfully...\n");
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.Prediv1Source = RCC_PREDIV1_SOURCE_PLL2;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
RCC_OscInitStruct.PLL2.PLL2State = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
/** Configure the Systick interrupt time
*/
__HAL_RCC_PLLI2S_ENABLE();
}
/**
* @brief SPI1 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI1_Init(void)
{
/* USER CODE BEGIN SPI1_Init 0 */
/* USER CODE END SPI1_Init 0 */
/* USER CODE BEGIN SPI1_Init 1 */
/* USER CODE END SPI1_Init 1 */
/* SPI1 parameter configuration*/
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(SPI_CS_GPIO_Port, SPI_CS_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_RESET);
/*Configure GPIO pin : SPI_CS_Pin */
GPIO_InitStruct.Pin = SPI_CS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(SPI_CS_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : PC4 */
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PB14 */
GPIO_InitStruct.Pin = GPIO_PIN_14;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 100);
return ch;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Giải thích code:
f_mount sẽ mount SD card. “/” là đường dẫn, nơi bạn muốn mount
fresult = f_mount(&fs, "/", 1);
if (fresult != FR_OK) send_uart ("ERROR!!! in mounting SD CARD...\n\n");
else send_uart("SD CARD mounted successfully...\n\n");
Sau khi mounted, chúng ta sẽ tạo file với hàm bên dưới
/* Create second file with read write access and open it */ fresult = f_open(&fil, "file2.txt", FA_CREATE_ALWAYS | FA_WRITE);
Nếu file tồn tại, nó sẽ được ghi đè, nếu không tồn tại sẽ tạo file.
Chúng ta sẽ write data sử dụng hàm bên dưới
/* Writing text */ strcpy (buffer, "This is File2.txt, written using ...f_write... and it says Hello from Controllerstech\n"); fresult = f_write(&fil, buffer, bufsize(buffer), &bw);
sau khi ghi xong, thì đóng file với dòng code:
f_close(&fil);
Giờ sẽ đọc data:
/* Open second file to read */
fresult = f_open(&fil, "file2.txt", FA_READ);
if (fresult == FR_OK)send_uart ("file2.txt is open and the data is shown below\n");
/* Read data from the file
* Please see the function details for the arguments
*/
f_read (&fil, buffer, f_size(&fil), &br);
send_uart(buffer);
send_uart("\n\n");
/* Close file */
f_close(&fil);
Cuối cùng chúng ta sẽ unmount thẻ nhớ sử dụng lại hàm f_mount.
/* Unmount SDCARD */
fresult = f_mount(NULL, "/", 1);
if (fresult == FR_OK) send_uart ("SD CARD UNMOUNTED successfully...\n");
Kế quả bên dưới
S ource code đính kèm: Github