
C – Typedef
t từ khóa gọi là typedef, bạn có thể sử dụng từ khóa này để đặt tên kiểu (type) mới của riêng bạn, tùy theo nhu cầu. Sau đây là một ví dụ để định nghĩa một cụm từ BYTE để khai báo những số có một byte.

Private blog | Tạ Lục Gia Hoàng
Private blog | Tạ Lục Gia Hoàng
t từ khóa gọi là typedef, bạn có thể sử dụng từ khóa này để đặt tên kiểu (type) mới của riêng bạn, tùy theo nhu cầu. Sau đây là một ví dụ để định nghĩa một cụm từ BYTE để khai báo những số có một byte.
Khi nói về Đầu Vào (Input), nó có nghĩa là cung cấp dữ liệu vào một chương trình. Input có thể được đưa vào dưới dạng tệp (file) hoặc từ dòng lệnh (command line). Lập trình C cung cấp sẵn một tập các hàm để đọc input và đưa cho chương trình theo yêu cầu.
C – Input & Output Read More »
Xuất Nhập File là một chủ đề không thể thiếu khi học lập trình C. Chương này trình bày cách để lập trình viên C tạo, mở, đóng file văn bản hoặc file nhị phân để lưu trữ dữ liệu của họ.
C – Xuất/Nhập File (File I/O) Read More »

Bộ tiền xử lý C chỉ là một công cụ thay thế văn bản (text) và nó hướng dẫn compiler thực hiện xử lý cần thiết trước khi biên dịch thực sự.
C – Bộ Tiền Xử Lý (Preprocessors) Read More »

Tệp tiêu đề (Header file) là file có phần mở rộng .h chứa khai báo hàm và định nghĩa macro của C được chia sẻ giữa một số tệp nguồn (source file). Có hai loại file header: một loại do người lập trình viết và một loại thuộc về trình biên dịch (compiler).
C – Tệp Tiêu Đề (Header Files) Read More »

Việc chuyển đổi một kiểu dữ liệu (data type) này thành một kiểu dữ liệu khác được gọi là ép kiểu (type casting) hoặc chuyển đổi kiểu (type-conversion). Ví dụ trong lập trình C, nếu bạn muốn lưu trữ một giá trị kiểu ‘long’ vào một số nguyên (integer) đơn giản thì bạn có thể ép kiểu ‘long’ thành ‘int’.
C – Ép Kiểu (Type Casting) Read More »
Học lập trình C với các khái niệm cơ bản về xử lý lỗi (Error Handling) như errno, perror(), strerror(), exit() và kiểm tra điều kiện xảy ra lỗi
C – Xử Lý Lỗi (Error Handling) Read More »

Trong ngôn ngữ lập trình, nếu một chương trình cho phép bạn gọi một hàm bên trong chính hàm đó, thì nó được gọi là lệnh gọi đệ quy (recursion call) của hàm.
C – Đệ Quy (Recursion) Read More »

Bài viết này sẽ hướng dẫn bạn cách định nghĩa một hàm có số lượng đối số biến thiên bằng ngôn ngữ C và thư viện stdarg.h
C – Đối Số Biến Thiên (Variable Arguments) Read More »

Người ta có thể truyền một số giá trị từ command line cho các chương trình C khi chúng được thực thi. Được gọi là các đối số dòng lệnh (command line arguments).
C – Command Line Arguments Read More »
Chương này giải thích về quản lý bộ nhớ động (dynamic memory management) trong C. Ngôn ngữ C cung cấp một số hàm để cấp phát và quản lý bộ nhớ trong ,stdlib.h
C – Quản Lý Bộ Nhớ (Memory Management) Read More »
Nội dung bao gồm:
9. Lập Trình Hướng Đối Tượng trong C
10. Trừu tượng dữ liệu (Data Abstraction)
11. Đóng gói (Encapsulation) và ẩn dữ liệu (data hiding)
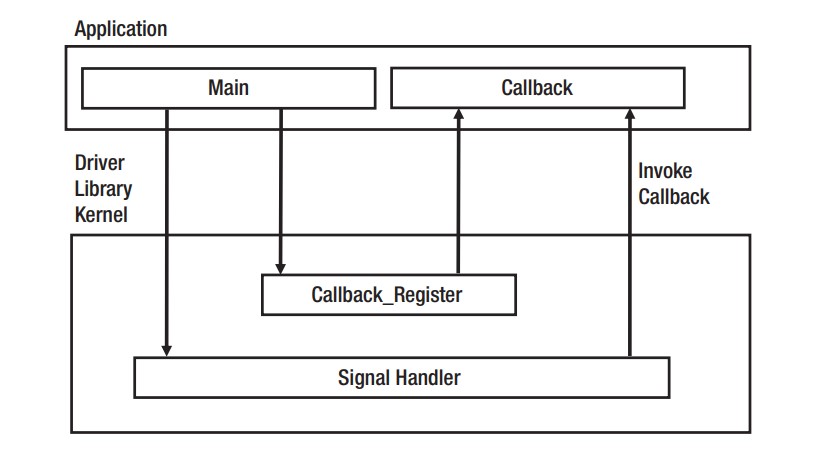
12. Callback Functions
Device Driver Fundamentals in C (Phần 3) Read More »